[AI Readability Summary] This article analyzes a multi-UAV cooperative combat system for 3D battlefields. Its core capabilities include 3D path planning, dynamic threat avoidance, and multi-aircraft time coordination. It addresses the limitations of traditional single optimization algorithms, such as slow convergence, susceptibility to local optima, and weak coordination. Keywords: Multi-UAV, GA-PSO, Threat Avoidance.
Technical Specifications Snapshot
| Parameter | Description |
|---|---|
| Primary Language | Matlab |
| Scenario Dimension | 3D battlefield environment |
| Core Protocol / Mechanism | Hierarchical sensing-decision-execution architecture |
| Optimization Algorithm | Hybrid Genetic Algorithm (GA) + Particle Swarm Optimization (PSO) |
| Threat Modeling | Markov-based dynamic threat assessment |
| Constraint Types | Terrain, flight altitude, time coordination, attack angle, safe separation |
| Input Data | Terrain elevation, threat zones, UAV states |
| Output Results | Coordinated trajectories, arrival times, threat-avoiding paths |
| Stars | Not provided in the source |
| Core Dependencies | Matlab simulation environment, optimization algorithm toolchain |
The system targets multi-constraint cooperative planning in complex 3D battlefields
The goal of this system is not to find the shortest path for a single UAV. Instead, it generates executable coordinated trajectories for multiple UAVs in environments where terrain variation, radar detection zones, and weapon threat regions coexist.
Unlike typical 2D obstacle avoidance, this problem must satisfy spatial safety, temporal synchronization, and attack-angle consistency at the same time. In essence, it is a multi-objective, heavily constrained, dynamic optimization problem.
The system’s value can be summarized in three areas
First, it improves survivability by avoiding high-risk detection and strike zones. Second, it improves mission consistency by ensuring that multiple UAVs complete penetration and strike actions within the same time window. Third, it reduces total cost by controlling path length and flight time under safety constraints.
function cost = path_cost(path, threatMap, terrain, syncErr)
lenCost = calc_path_length(path); % Compute path length cost
threatCost = eval_threat(path, threatMap); % Evaluate path threat exposure cost
terrainCost = check_terrain(path, terrain);% Check terrain collision and altitude constraints
cost = lenCost + 2*threatCost + terrainCost + syncErr; % Composite objective function
endThis code snippet shows the composite cost modeling approach commonly used in cooperative path planning.
The system architecture uses a layered design to support dynamic closed-loop decision-making
The original architecture can be abstracted into three layers: sensing, decision, and execution. This layering decouples environment understanding, path optimization, and flight control, which makes the system easier to reproduce in research and extend in engineering practice.
The sensing layer collects terrain elevation, threat sphere positions, and UAV states. The decision layer handles initial trajectory generation, threat assessment, cooperative control, and GA-PSO optimization. The execution layer flies according to the planned trajectory and feeds status information back to the upper layer for secondary correction.
The sensing layer determines whether optimization inputs are trustworthy
If terrain modeling is coarse or threat boundary updates lag behind reality, even an otherwise optimal path may be unflyable. In practice, this layer defines the upper performance bound of the entire system, especially in dynamic battlefields.
The decision layer is the algorithmic core of the system
The decision layer must solve three problems at once: how to fly shorter, how to fly safer, and how to make multiple UAVs arrive together. The key innovation in the source material is that it integrates dynamic threats and swarm coordination into a unified planning framework instead of treating them as separate post-processing steps.
for i = 1:numUAV
path0{i} = init_3d_path(start(i,:), goal, terrain); % Generate the initial 3D path
risk{i} = markov_threat_eval(path0{i}, threatZones); % Evaluate dynamic threats
path1{i} = avoid_threat(path0{i}, risk{i}); % Perform local correction based on risk
endThis workflow corresponds to a typical planning pipeline: generate first, evaluate next, and correct afterward.
The 3D path planning module jointly models attitude variables and time variables
The article emphasizes the joint control of heading angle, pitch angle, and time variables. In practical terms, a path is not just a sequence of spatial points. It also implicitly captures speed changes and arrival times.
This allows the system to adjust climbing, descending, and turning in complex terrain, reduce speed in locally risky regions, and accelerate in low-risk areas, thereby creating the conditions needed for time coordination.
Terrain avoidance is a fundamental constraint in 3D scenarios
Terrain elevation must enter the planner as a hard constraint. A UAV trajectory must always remain above the terrain surface plus a safety margin. Otherwise, the resulting optimal solution has no engineering value.
if path(k,3) <= terrain(xIdx,yIdx) + safeHeight
path(k,3) = terrain(xIdx,yIdx) + safeHeight; % Enforce safe ground clearance
endThis type of constraint correction is commonly used to ensure that simulated trajectories remain executable.
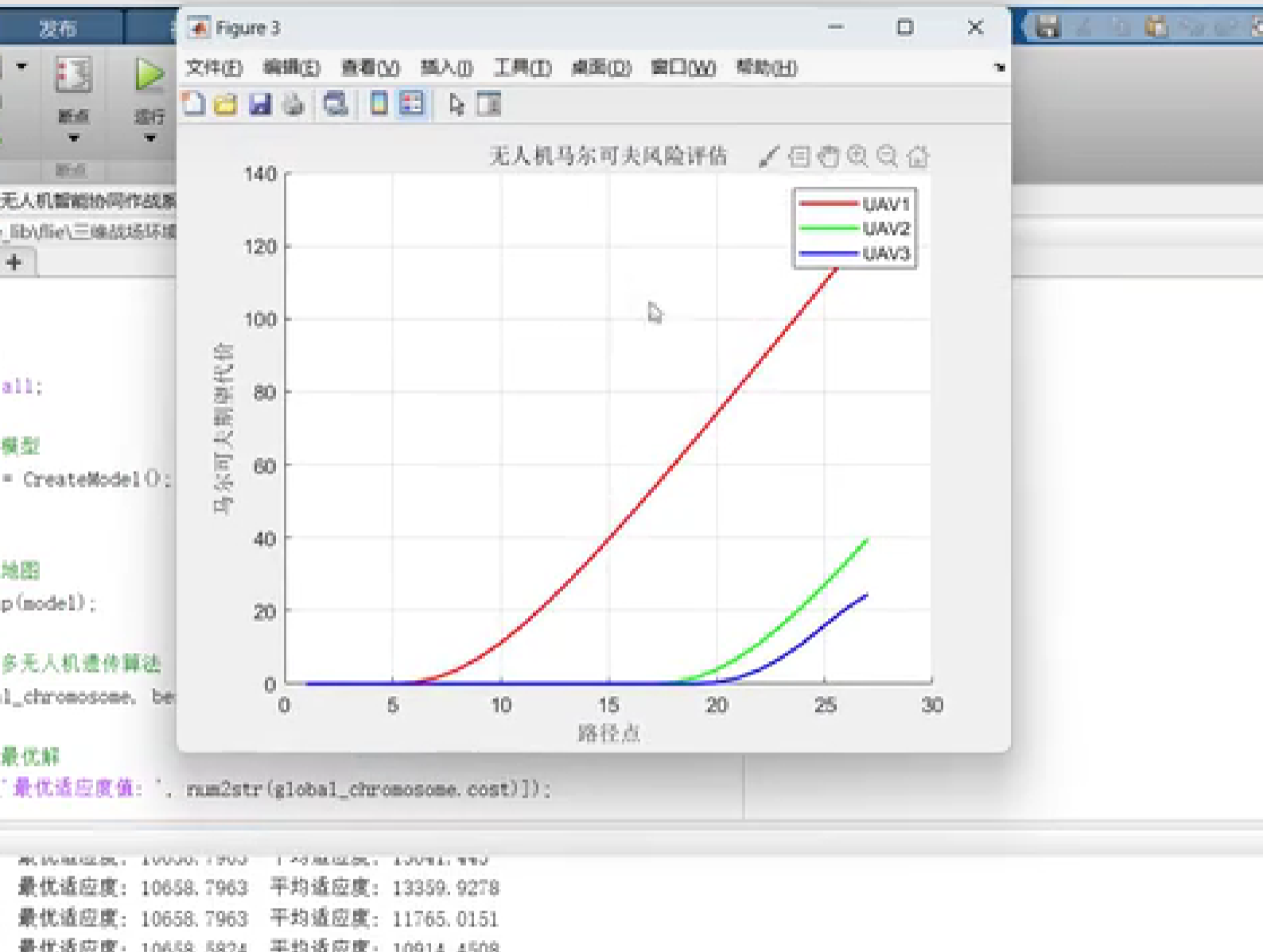
The threat avoidance module introduces dynamic risk awareness through a Markov model
Unlike static no-fly zones, the source material uses a Markov model to describe threat state transitions. The key advantage is that the system asks not only, “Is this location dangerous now?” but also, “Will it become more dangerous next?”
The state space can be divided into safe zones, radar zones, weapon zones, and similar categories. A transition probability matrix is then constructed from historical information and real-time observations, allowing the system to compute the survival probability or risk exposure value of a trajectory segment.
Dynamic threat assessment fits the uncertainty of battlefield environments
Radar operating modes, firepower coverage intensity, and local situation changes can all make the same path carry different risks at different times. Markov modeling directly addresses the limitations of traditional static spherical threat models.
P = [0.75 0.20 0.05;
0.15 0.70 0.15;
0.05 0.25 0.70]; % State transition probability matrix
stateProb = initProb;
for t = 1:T
stateProb = stateProb * P; % Recursively compute the future threat state distribution
end
riskScore = stateProb(2) + 2*stateProb(3); % Weighted risk for radar and weapon zonesThis code captures the basic idea behind dynamic threat quantification.
The hybrid GA-PSO algorithm balances global search and fast convergence
When used alone, GA provides strong global exploration but converges relatively slowly. When used alone, PSO converges quickly in the early stage but can easily fall into local optima later. Combining the two is a common and effective tradeoff for this type of problem.
The approach described in the article first uses GA to screen for high-quality individuals, then uses those individuals as the initial particle swarm for PSO-based refinement. This preserves population diversity while improving final solution quality.
Adaptive crossover and mutation strategies determine search stability
In the early iterations, crossover and mutation probabilities should be higher to enlarge the search radius. In the later iterations, disturbance should be reduced so the algorithm can converge around candidate optimal regions. This strategy significantly mitigates premature convergence.
pc = pc_max - (pc_max - pc_min) * iter / maxIter; % Crossover probability decreases over iterations
pm = pm_max - (pm_max - pm_min) * iter / maxIter; % Mutation probability decreases over iterations
w = w_max - (w_max - w_min) * iter / maxIter; % PSO inertia weight decreases over iterationsThis parameter scheduling strategy balances exploration capability and convergence precision.
Simulation results demonstrate trajectories, threat spheres, and coordinated arrival behavior
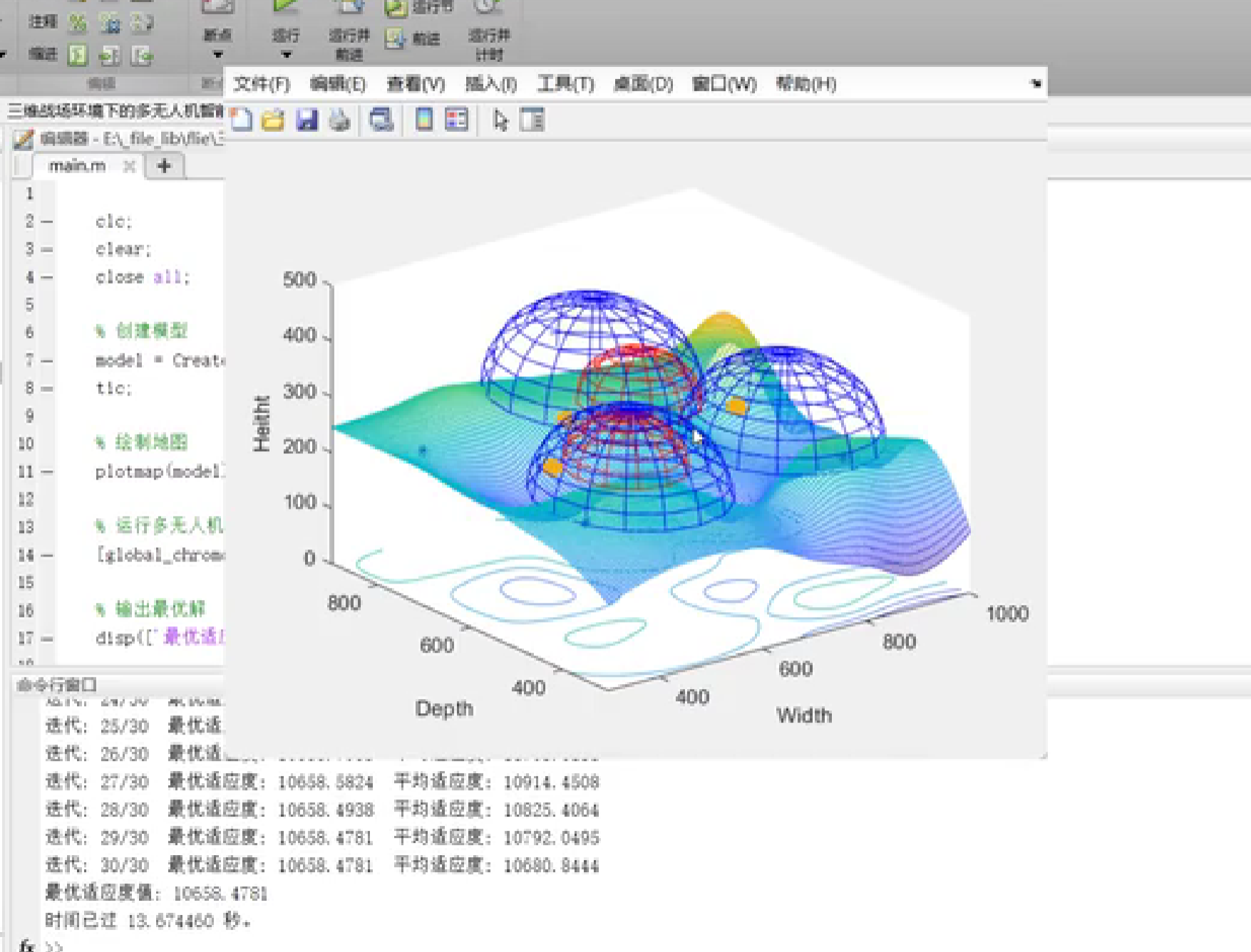 AI Visual Insight: This figure shows multiple UAV trajectories and their relationship to the target region in a 3D battlefield space. In most cases, differently colored trajectories route around spherical threat volumes while maintaining altitude variation, which reflects the path optimizer’s ability to jointly avoid terrain undulation and spatial exclusion zones.
AI Visual Insight: This figure shows multiple UAV trajectories and their relationship to the target region in a 3D battlefield space. In most cases, differently colored trajectories route around spherical threat volumes while maintaining altitude variation, which reflects the path optimizer’s ability to jointly avoid terrain undulation and spatial exclusion zones.
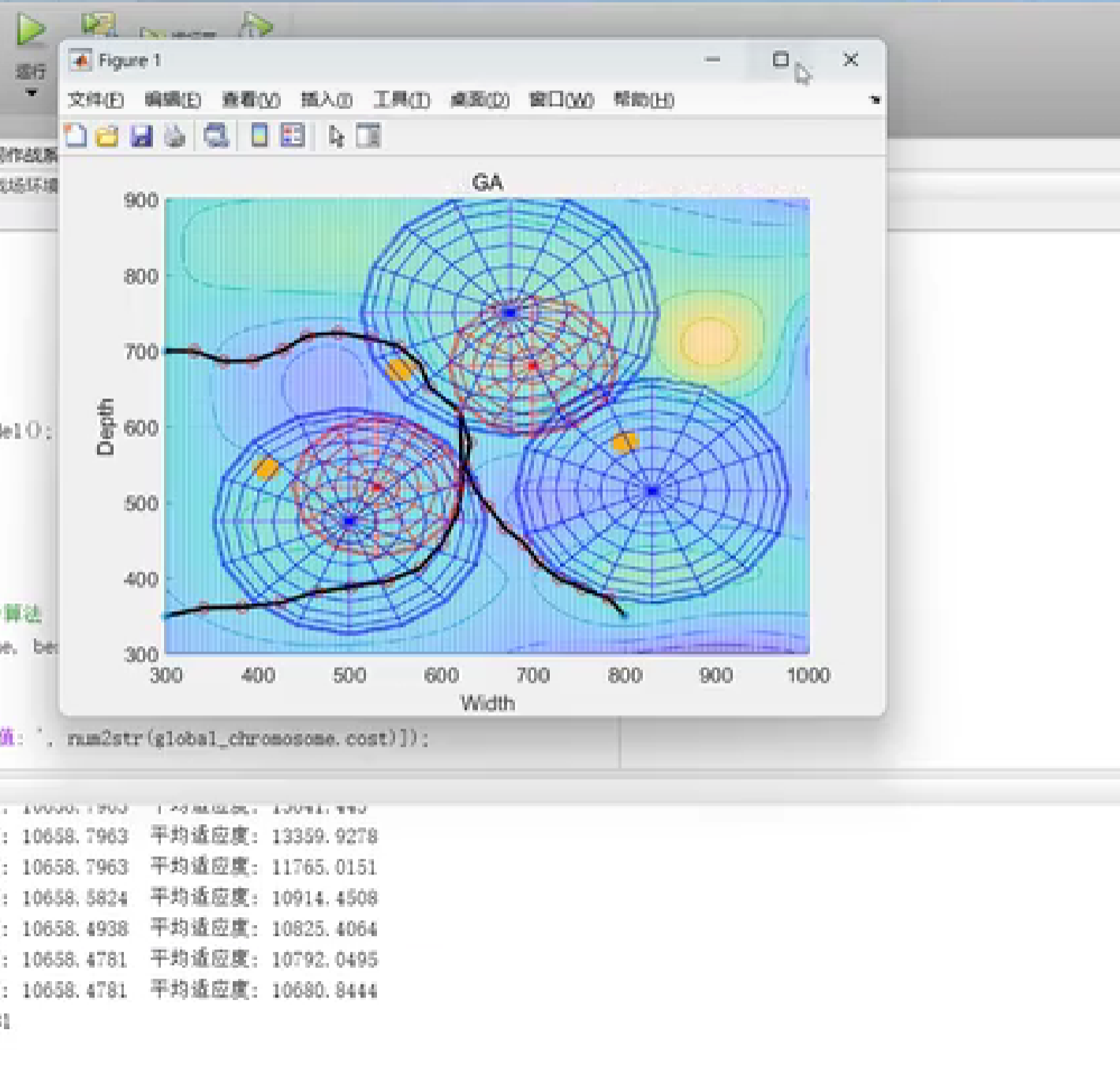 AI Visual Insight: This figure likely focuses on multiple UAVs converging from distributed starting points toward the same target. If the trajectories also show bends and altitude-layer differences, the system is likely handling spatial conflict constraints while controlling synchronized arrival.
AI Visual Insight: This figure likely focuses on multiple UAVs converging from distributed starting points toward the same target. If the trajectories also show bends and altitude-layer differences, the system is likely handling spatial conflict constraints while controlling synchronized arrival.
 AI Visual Insight: This image most likely illustrates the spatial distribution of threat zones and flyable corridors. If red and blue spheres are dense while the trajectories remain smooth and connected, it indicates that the hybrid GA-PSO algorithm maintains strong solution feasibility and path continuity under heavy constraints.
AI Visual Insight: This image most likely illustrates the spatial distribution of threat zones and flyable corridors. If red and blue spheres are dense while the trajectories remain smooth and connected, it indicates that the hybrid GA-PSO algorithm maintains strong solution feasibility and path continuity under heavy constraints.
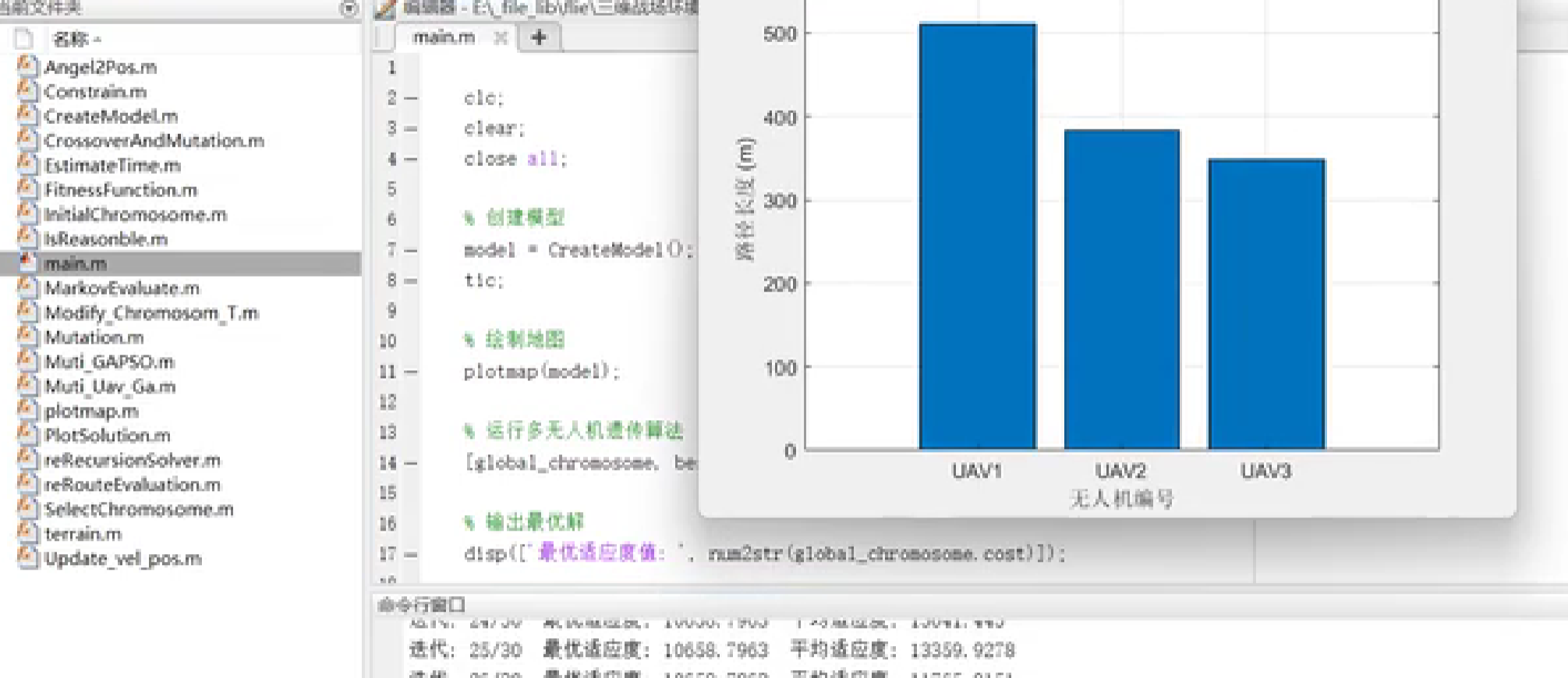
 AI Visual Insight: This result figure is typically used to compare path quality before and after optimization. If the optimized path has fewer turns and lower redundancy, the algorithm is reducing exposure risk while also lowering route length and maneuvering cost.
AI Visual Insight: This result figure is typically used to compare path quality before and after optimization. If the optimized path has fewer turns and lower redundancy, the algorithm is reducing exposure risk while also lowering route length and maneuvering cost.
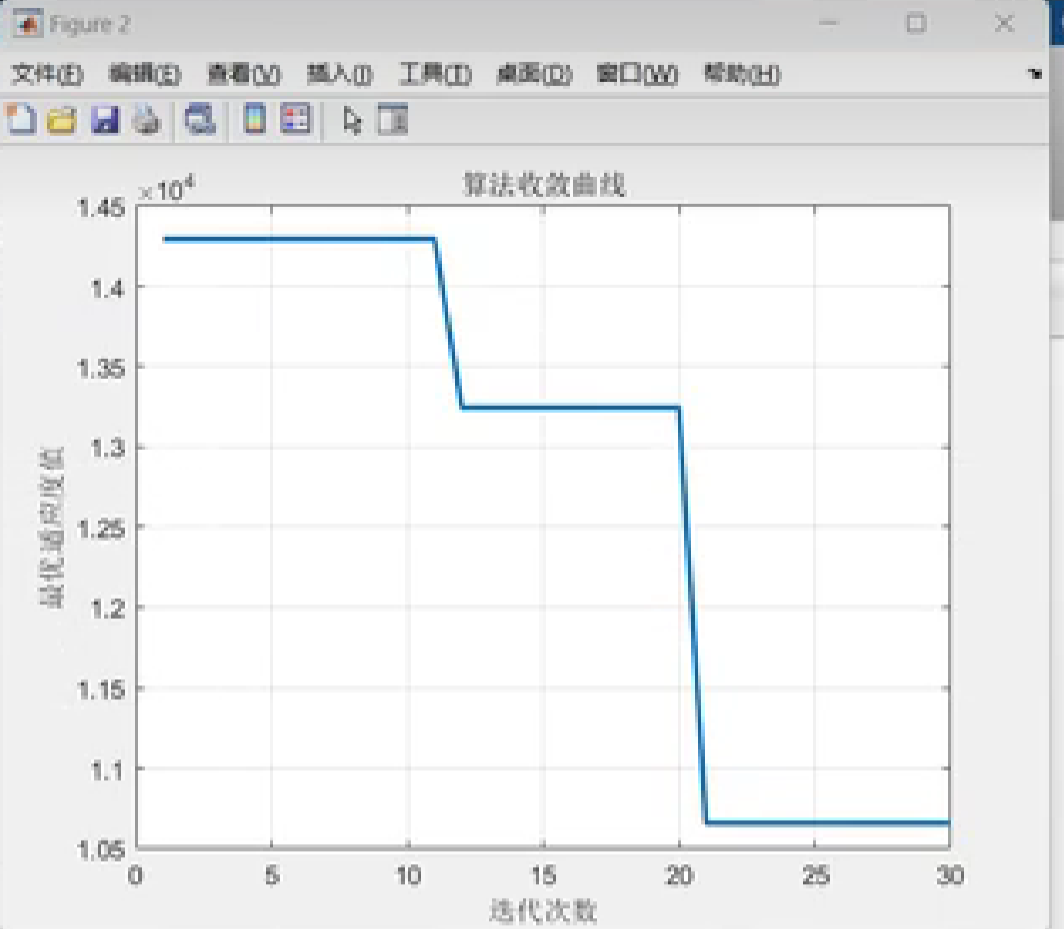
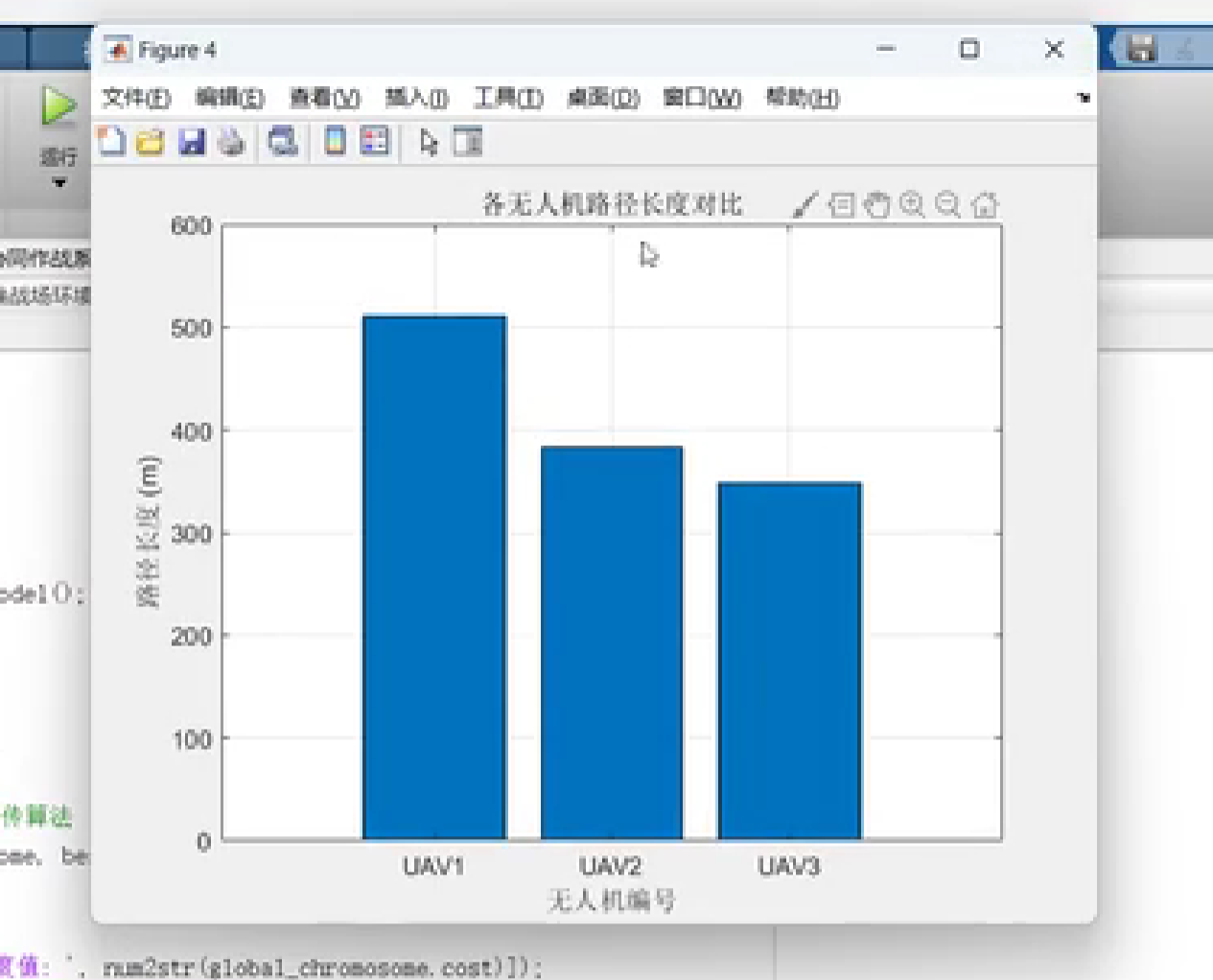 AI Visual Insight: If this figure contains time curves, iteration curves, or objective function trends, it indicates that the algorithm has an observable convergence process. A stabilizing curve usually means that coordination error, threat cost, or total cost is approaching a stable optimal region.
AI Visual Insight: If this figure contains time curves, iteration curves, or objective function trends, it indicates that the algorithm has an observable convergence process. A stabilizing curve usually means that coordination error, threat cost, or total cost is approaching a stable optimal region.
 AI Visual Insight: This type of result figure usually presents the final coordinated attack formation. If multiple UAVs approach the same target from different incident directions, the system is simultaneously satisfying both time synchronization and attack-angle coordination constraints.
AI Visual Insight: This type of result figure usually presents the final coordinated attack formation. If multiple UAVs approach the same target from different incident directions, the system is simultaneously satisfying both time synchronization and attack-angle coordination constraints.
The engineering value of this approach comes from embedding coordination into the main path planning loop
Many traditional methods first plan a path for each UAV independently and then patch conflicts and timing errors afterward. That often leads to repeated adjustments and sharply increased cost. By contrast, this method injects synchronized arrival, angle constraints, and safe-separation constraints directly into the main optimization stage, producing a more integrated solution.
From an engineering perspective, this approach is better suited to mission-level simulation platforms and is easier to extend later with task allocation, communication constraints, energy consumption models, and online replanning modules.
The next expansion directions are also clear
The framework can be extended further by introducing mobile threat sources, communication link constraints, heterogeneous UAV performance differences, and stronger online replanning capabilities. If combined with ROS, PX4, or a digital twin environment, its research value would increase further.
FAQ
1. Why use a hybrid GA-PSO approach instead of GA or PSO alone?
Because GA is strong at global search but converges slowly, while PSO converges quickly but is more likely to get trapped in local optima. The hybrid approach expands the global search space first and then performs local refinement, which makes it well suited to high-dimensional constrained problems such as multi-UAV 3D cooperative path planning.
2. What advantages does Markov-based threat modeling offer over static threat zones?
Static modeling can only express whether the current position is dangerous. A Markov model can also represent how risk evolves over time. That makes it better suited to dynamic battlefields and more capable of supporting real-time path adjustment and survivability assessment.
3. Is this Matlab solution suitable for direct deployment on real UAVs?
More accurately, it is best suited for algorithm validation and simulation evaluation first. To deploy it on real platforms, you would still need to add flight-control interfaces, sensor error modeling, communication latency handling, safety redundancy, and hardware-in-the-loop testing.
Core takeaway
This article reconstructs a multi-UAV cooperative combat system for 3D battlefield environments, with a focus on hybrid GA-PSO path planning, Markov-based dynamic threat assessment, and time/angle coordinated control. It is a strong reference for understanding the architecture, algorithms, and validation priorities of Matlab-based simulation systems.