Bluetooth HID delivers wireless input through coordinated use of the Control Channel and Interrupt Channel: the former ensures reliable delivery for configuration and queries, while the latter enables low-latency reporting for keyboards, mice, and similar devices. This article breaks down report mapping, message flow, MTU constraints, and common usage scenarios. Keywords: Bluetooth HID, Control Channel, Interrupt Channel.
Technical Specification Snapshot
| Parameter | Description |
|---|---|
| Protocol | Bluetooth HID Profile |
| Transport Layer | L2CAP |
| Core Channels | Control Channel, Interrupt Channel |
| Core Messages | GET*, SET*, DATA, HANDSHAKE, HID_CONTROL |
| Minimum MTU | 48 bytes |
| Typical Devices | Keyboards, mice, game controllers, sensors |
| Star Count | Not provided in the source |
| Core Dependencies | Bluetooth stack, L2CAP, HID Report Descriptor |
The essence of Bluetooth HID transport is a dual-channel division of labor
Bluetooth HID is not just about “sending data.” It first solves two conflicting requirements: one demands reliability, and the other demands real-time responsiveness. To address this, the protocol splits transport into a Control Channel and an Interrupt Channel, with each channel handling a distinct responsibility.
The Control Channel favors synchronous exchange and explicit confirmation, which makes it suitable for configuration, status queries, and protocol mode switching. The Interrupt Channel favors asynchronous, low-latency delivery, which makes it suitable for high-frequency interactions such as mouse movement, keyboard input, and game controller vibration.
Report type determines which path the data must take
Feature reports can travel only through the Control Channel because they are usually tied to device configuration and status. This data cannot be lost and is not appropriate for high-frequency transmission. Input reports and Output reports are more flexible: they can be transferred asynchronously over the Interrupt Channel or exchanged synchronously over the Control Channel.
Feature Report -> Control Channel -> Synchronous request/response
Input Report -> Interrupt IN -> Asynchronous real-time reporting
Output Report -> Interrupt OUT -> Asynchronous real-time control
Input/Output Report -> Control Channel -> Query or one-time configurationThis mapping illustrates the core HID design principle: tightly bind data type to transport semantics so channel responsibilities remain clear and predictable.
The Control Channel is responsible for reliable transport
The Control Channel follows a simple model: the host initiates, and the device responds. The host cannot stack multiple control requests back to back. Until the previous transaction completes, the next transaction cannot enter the Control Channel for the same device.
This transport model is appropriate for GET_REPORT, SET_REPORT, GET_PROTOCOL, SET_PROTOCOL, and HID_CONTROL commands. Its goal is not maximum speed, but clear and observable success or failure.
 AI Visual Insight: This diagram shows the synchronous transaction model used by the Bluetooth HID Control Channel. The host sends a control request first, and the device parses it and returns either DATA or HANDSHAKE, forming a strict request-response loop. This link emphasizes observable transaction completion and explicit error reporting, which makes it well suited for high-reliability scenarios such as configuration writes, protocol switching, and status queries.
AI Visual Insight: This diagram shows the synchronous transaction model used by the Bluetooth HID Control Channel. The host sends a control request first, and the device parses it and returns either DATA or HANDSHAKE, forming a strict request-response loop. This link emphasizes observable transaction completion and explicit error reporting, which makes it well suited for high-reliability scenarios such as configuration writes, protocol switching, and status queries.
GET* and SET* form the backbone of the Control Channel
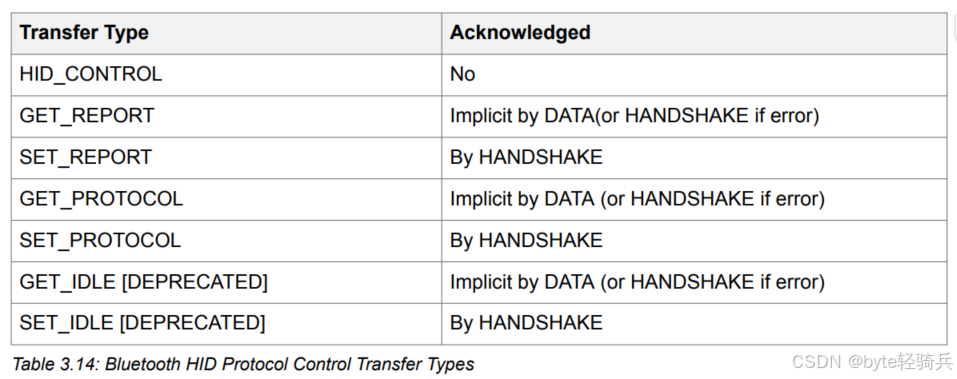
GET_* operations are used to retrieve data, such as when the host queries the protocol mode or reads a specific report. If the device can process the request correctly, it returns DATA. If parameters are invalid or the length exceeds limits, it returns HANDSHAKE with an error code.
SET_* operations are used to write data, such as when setting the protocol mode, updating LED status, or sending configuration parameters. After processing completes, the device returns HANDSHAKE so the host can determine whether the operation succeeded.
// Pseudocode: Control Channel transaction model
send_control_request(msg); // Host sends a GET_* or SET_* request
resp = wait_response(timeout_ms); // Wait for the device response
if (resp.type == DATA) { // Received a data response
parse_report(resp.payload); // Parse the returned report
} else if (resp.type == HANDSHAKE) {// Received a handshake result
check_status(resp.code); // Check success or a specific error code
}This code reflects the key value of the Control Channel: every operation returns an explicit completion state.
There are three Control Channel rules you must remember
First, only one transaction can be active at a time. Otherwise, the device cannot reliably preserve request ordering and state consistency.
Second, message length is strictly constrained by the MTU. If the header plus payload exceeds the L2CAP MTU, a GET operation must not return data, and a SET operation must not be sent.
Third, VIRTUAL_CABLE_UNPLUG is a high-priority exception. It can interrupt the current transfer and immediately trigger link teardown without waiting for normal transactions to finish.
The Interrupt Channel handles low-latency real-time data flow
The Interrupt Channel uses an asynchronous, unacknowledged transport model. The sender can continue immediately after transmission and does not wait for an ACK from the receiver. This makes it ideal for high-frequency input events, but it also means the upper layer must tolerate occasional packet loss.
In keyboard and mouse scenarios, this design is highly practical. If one mouse movement report is occasionally lost, the next frame quickly supersedes it. If every frame had to wait for acknowledgment, the user experience would become noticeably sluggish.
Interrupt IN and Interrupt OUT handle reporting and control separately
Interrupt IN carries data from the device to the host. Typical examples include mouse coordinates, key scan codes, and sensor readings. Interrupt OUT carries data from the host to the device. Typical examples include controller vibration and keyboard LED updates.
# Pseudocode: Input reporting over the Interrupt Channel
report = build_input_report(dx=3, dy=-1) # Build a mouse movement report
if len(report) + 1 <= mtu: # Validate MTU with a 1-byte illustrative header
send_interrupt_in(report) # Send asynchronously over the Interrupt ChannelThis code shows that even though the Interrupt Channel prioritizes real-time delivery, the sender must still satisfy length constraints before transmitting.
The efficiency of the Interrupt Channel comes from three mechanisms
First, the lack of acknowledgment reduces round-trip latency. Second, newer real-time control data can supersede older state, which avoids unnecessary delivery of stale information. Third, the receiver still performs length validation so it does not parse malformed data even without acknowledgments.
The protocol also recommends keeping high-frequency input reports as small as possible. A common guideline is to keep them within 12 bytes to fit more reliably into low-latency link encapsulation.
General constraints determine whether a device is truly interoperable
Whether data travels through the Control Channel or the Interrupt Channel, HID transport depends on two fundamental constraints: report length validation and MTU limits. Many interoperability issues are not caused by failed Bluetooth pairing or connection setup, but by report formats and lengths that violate protocol requirements.
In Report Protocol mode, the receiver must validate lengths strictly according to the Report Descriptor definition. In Boot Protocol mode, keyboards and mice use fixed formats, and reports with invalid lengths should be ignored immediately.
Transport priority affects system response ordering
Urgent control messages have the highest priority, such as SUSPEND, EXIT_SUSPEND, and VIRTUAL_CABLE_UNPLUG. HANDSHAKE comes next because the host must learn the result of a control transaction as quickly as possible. Real-time DATA and ordinary control requests come after that.
Priority from highest to lowest:
HID_CONTROL (urgent) > HANDSHAKE > Interrupt DATA > normal GET_*/SET_*This rule explains why real-time input may be temporarily preempted during power-state transitions or link teardown.
Typical scenarios best demonstrate the value of the dual-channel design
When a Bluetooth keyboard sends input, key scan codes reach the host quickly through Interrupt IN, and the host can immediately map them to characters. The entire path is optimized for one goal: press a key and see the result instantly.
When the host needs to turn on the Caps Lock LED, it often uses SET_REPORT over the Control Channel. After the device executes the request, it returns HANDSHAKE. In this case, the system prioritizes guaranteed state application over fastest possible transmission.
The same principle applies to HID sensor devices. Periodic measurement values fit naturally on the Interrupt Channel for continuous reporting, while sampling intervals, measurement ranges, and calibration parameters fit better on the Control Channel for reliable configuration.
In implementation, you should check four points first
Start by verifying that the report descriptor matches the actual length
If parsing fails on the host side, first verify the Report ID, field order, and total length. A large number of HID compatibility issues come from mismatches between descriptor definitions and real packets.
Then verify MTU and message header overhead
Many developers calculate only the payload length and forget the HID message header and L2CAP encapsulation overhead. This often causes boundary-length errors that appear as intermittent packet loss or complete lack of response.
Finally, verify that control transactions are serialized
If firmware allows multiple GET/SET requests to enter concurrently, response mismatches become very likely. A Control Channel implementation must maintain a strict transaction state machine.
FAQ
1. Why doesn’t Bluetooth HID use a single channel for all messages?
Because configuration queries and real-time input have completely different goals. The former requires reliable confirmation, while the latter requires low latency. The dual-channel design is a protocol-level separation between reliability and real-time responsiveness.
2. Why does the Interrupt Channel allow unacknowledged transport?
Because keyboard, mouse, and similar input data naturally follows a “new state replaces old state” model. The protocol trades a small amount of potential packet loss for substantially lower interaction latency, which is the better choice for human input scenarios.
3. What are the most common mistakes when developing a Bluetooth HID device?
The most common issues are report length mismatches, ignoring the MTU, allowing concurrent control transactions, and incorrectly sending Feature Reports through the Interrupt Channel. All of these directly harm host compatibility and interaction stability.
Core summary
This article systematically reconstructs the Bluetooth HID transport mechanism, focusing on the division of responsibilities between the Control Channel and Interrupt Channel, GET/SET and DATA/HANDSHAKE message flows, MTU and length-validation constraints, and the trade-off between real-time responsiveness and reliability in common scenarios such as keyboards and mice.